請(qǐng)問這份代碼有問題嗎,卡在輸入捕獲初始化,跑不起來
void Input_Capture_Init(u16 arr, u16 psc)
{
? ? GPIO_InitTypeDef? ? ? ? GPIO_InitStructure = {0};
? ? TIM_ICInitTypeDef? ? ? ?TIM_ICInitStructure = {0};
? ? TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure = {0};
? ? NVIC_InitTypeDef? ? ? ? NVIC_InitStructure = {0};
? ? RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE);
? ? RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
? ? GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
? ? GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
? ? GPIO_Init(GPIOB, &GPIO_InitStructure);
? ? GPIO_ResetBits(GPIOB, GPIO_Pin_6);
? ? TIM_TimeBaseInitStructure.TIM_Period = 0xFFFF;
? ? TIM_TimeBaseInitStructure.TIM_Prescaler = 48000 - 1;
? ? TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
? ? TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
? ? TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0x00;
? ? TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStructure);
? ? TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
? ? TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
? ? TIM_ICInitStructure.TIM_ICFilter = 0x00;
? ? TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
? ? TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
? ? TIM_ICInit(TIM4, &TIM_ICInitStructure);
//? ? TIM_PWMIConfig(TIM4, &TIM_ICInitStructure);
? ? NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
? ? NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
? ? NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
? ? NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
? ? NVIC_Init(&NVIC_InitStructure);
//? ? TIM_SelectInputTrigger(TIM1, TIM_TS_TI1FP1);
//? ? TIM_SelectSlaveMode(TIM1, TIM_SlaveMode_Reset);
//? ? TIM_SelectMasterSlaveMode(TIM1, TIM_MasterSlaveMode_Enable);
? ? TIM_ITConfig(TIM4, TIM_IT_Update|TIM_IT_CC1 , ENABLE);
? ? TIM_Cmd(TIM4, ENABLE);
}
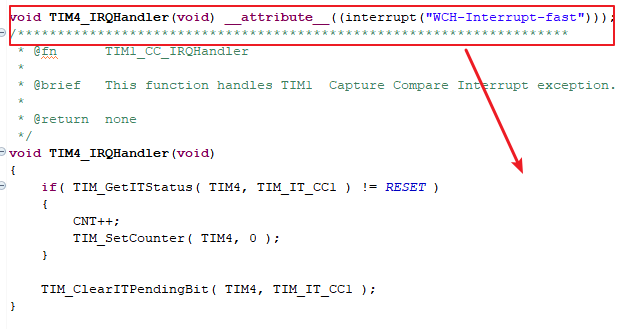
void TIM4_IRQnHandler (void)
{
? ? printf("111\n");
? ? if (TIM_GetITStatus(TIM4,TIM_IT_CC1) != RESET)? //檢查TIM5更新中斷發(fā)生與否
? ? ? ? {
? ? ? ? printf("222\n");
? ? ? ? }
? ? ?TIM_ClearITPendingBit(TIM4,TIM_IT_CC1|TIM_IT_Update); //清除中斷標(biāo)志位
}